



 首页
首页 编程仿真
编程仿真 为什么
为什么 关于
关于 核心功能
核心功能 客户案例
客户案例 会员中心
会员中心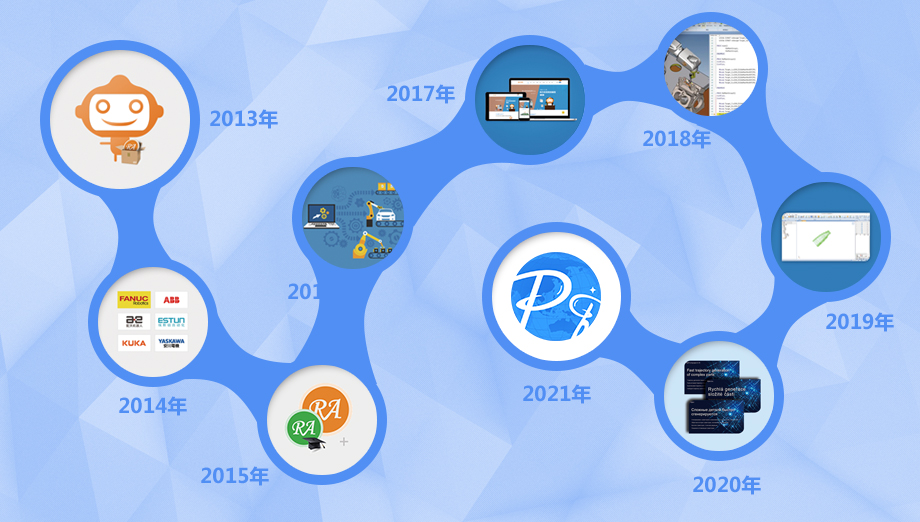
软件简介
PQArt(原RobotArt)是中国人自主研发的工业机器人离线编程软件,始于2013年,经过多年的研发与应用,PQArt掌握了多项核心技术,包括3D平台、几何拓扑、特征驱动、自适应求解算法、开放后置、碰撞检测、代码仿真等。它的功能覆盖了机器人集成应用完整的生命周期,包括方案设计、设备选型、集成调试及产品改型,累计已有10万多人使用PQArt进行学习或工作。
在教育领域,PQArt有强大的后备人才,有大量在校学生以PQArt虚拟仿真与离线编程为入口开始自己的机器人学习与从业生涯。同时,PQArt也为教育部中职、高职机器人相关赛项提供技术支持,选手们在PQArt软件中一展自己的才华。
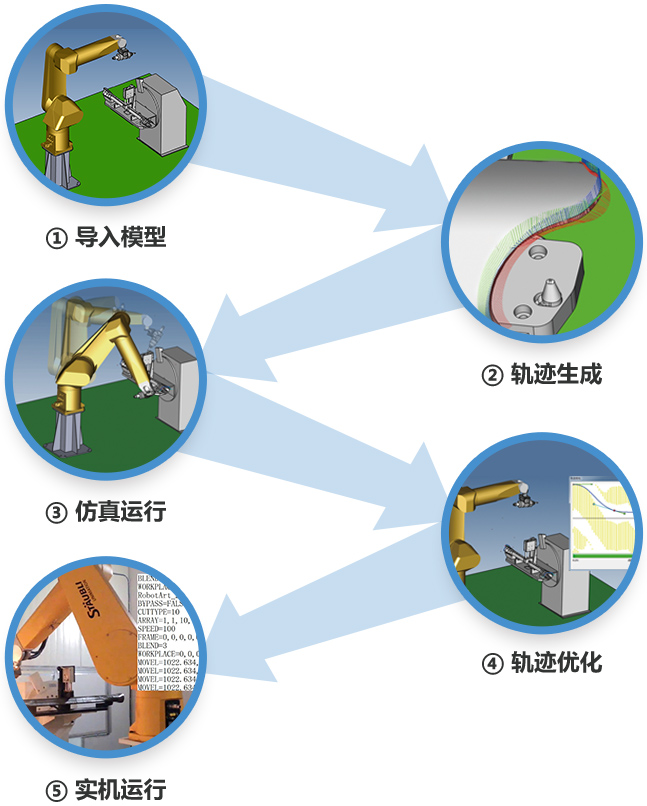
工作流程
PQArt软件集3D模型导入、轨迹生成、模拟仿真、轨迹调整、代码生成于一体,一站解决机器人编程问题。
里程碑
-
2013年
PQArt首次问世,以轨迹规划为核心优势

-
2014年
支持多品牌机器人仿真,自适应生成后置代码

-
2015年
重构平台,正式推出PQArt企业版、教育版等

-
2016年
支持深度自定义,面向机器人厂商正式推出OEM版本

-
2017年
PQ Cloud正式上线,提供云端机器人库与学习资源

-
2018年
增加外部轴高级编程模块,集成代码编辑与调试环境
