首页
首页 编程仿真
编程仿真 为什么
为什么 关于
关于 核心功能
核心功能 客户案例
客户案例 会员中心
会员中心-
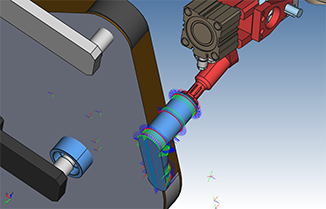
复杂零件轨迹快速生成
 根据零件点、线、面生成轨迹基于特征的轨迹历史追溯丰富的轨迹、点编辑功能
根据零件点、线、面生成轨迹基于特征的轨迹历史追溯丰富的轨迹、点编辑功能
-

后置代码编辑调试
自适应语法编辑器语法检查代码仿真虚拟调试 -
海量云端资源
海量在线机器人、工具、设备库在线帮助与学习资源海量在线成功案例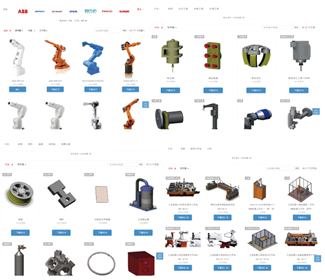
-

支持深度自定义
DH参数自定义几何模型自定义求解算法自定义后置配置自定义 -
可达空间
计算机器人法兰位置的可达空间计算机器人末端执行器的可达空间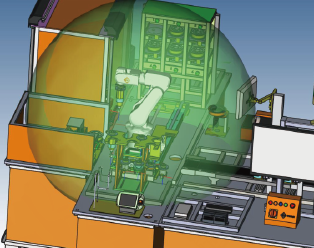
-
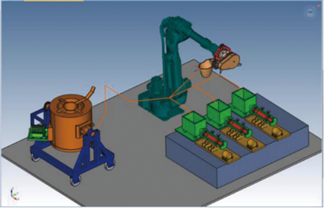
外部工具集
手持工具,零件固定手持零件,工具固定提供了外部工具、变位工具、连续TCP、工件坐标等配合使用,使手持零件不再复杂 -
碰撞检测
模拟检测机器人在运动时和周边零部件的碰撞情况通过高亮线和输出碰撞信息加以检测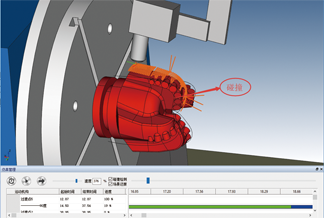
-
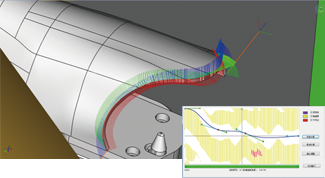
轨迹优化处理
在轨迹优化界面中显示轴超限、奇异点、不可达信息通过鼠标拖拽自动避让,获得理想轨迹 -
外部轴
通过外部轴联动的插值功能,用户可优化外部轴位置以实现沿整个刀具路径的平滑运动,而不需要手动修改之间的每个机器人的目标位置控制点。